 欢迎访问济南齐兴测绘科技有限公司网站!
欢迎访问济南齐兴测绘科技有限公司网站! 全国咨询热线:15553171585欢迎访问济南齐兴测绘科技有限公司网站!全国咨询热线:15553171585
全国咨询热线:15553171585欢迎访问济南齐兴测绘科技有限公司网站!全国咨询热线:15553171585
济南齐兴测绘科技有限公司
地址:济南市高新区新泺大街1166号奥盛大厦3号楼2007室
公司网址:www.jnqxch.com
微信号:15553171585
联系电话:0531-85929206
15553171585 薛经理
随着数字城市以及智慧城市的提出,城市模拟从二维发展到三维,对城市三维实景建模的要求越来越高。本文以中国科学院大学为研究区,结合无人机倾斜摄影的高效性和地面激光扫描的精确性,提出了以无人机倾斜摄影为主,地面激光雷达为辅的城市三维实景融合建模方法。在实验过程中,外业采用“规则航线自动拍摄为主,兴趣区手动拍摄为辅”的无人机影像获取策略;内业则利用“手动粗配准,ICP 算法精配准”的方法将地面雷达点云统一到无人机影像坐标系统中。实验结果表明,多源数据融合的方法既能够保证三维建模的效率,又能够修正无人机单独建模模型的地物扭曲、空洞等问题,提高模型的精度,优化城市三维模型。
1 技术路线
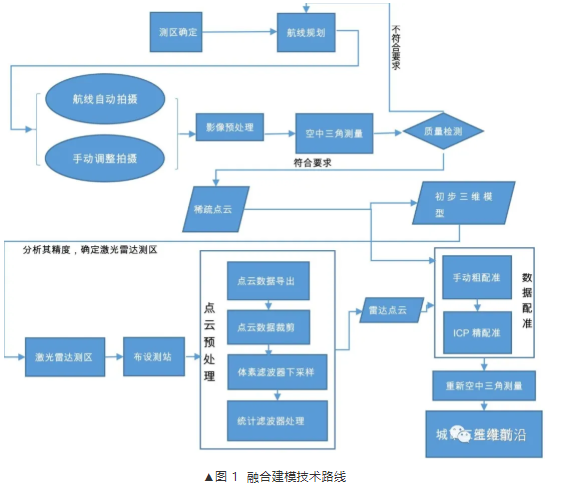
三维建模的基本原理是利用获取的数据生成点云数据,从而构建 TIN 三角网,最后对 TIN 三角网进行贴膜处理。倾斜摄影技术与地面激光雷达技术进行融合建模的本质是利用无人机影像生成的稀疏点云与激光雷达点云融合,最后生成更高精度的三维模型。其具体技术流程如图 1 所示。
2 设计方案
2.1 无人机数据采集
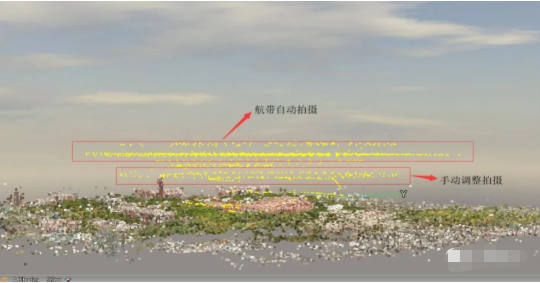
▲图 2 航线自动拍摄与手动调整拍摄结合
3 数据处理与精度评估

对影像进行预处理之后,需要对影像数据进行空中三角测量,从而确定影像拍摄时的位置和方向,即确定像片的内外方位元素。由于在进行拍摄时,相机的传感器尺寸、镜头焦距等是固定的,因此内部定向是固定的。空中三角测量(图 5)的主要任务是利用航拍影像提取特征点以及匹配特征点,然后将特征点进行连接,从而计算外方位元素,将测区的所有影像纳入统一的物方坐标系。

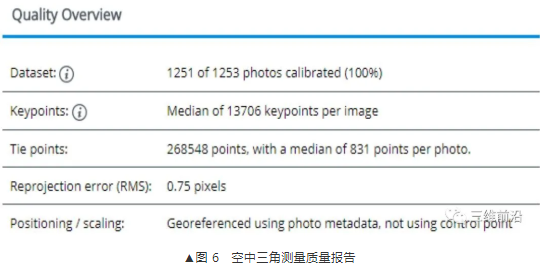
根据空中三角测量质量报告分析空三解算的精度。如图 6 所示,导入的影像总共有 1253 张,其中有 2张不能用于重建,原因是这 2 张照片与其他的照片重叠度不够高或者没有提取出连接点。图 7 给出了这 2张照片中可能存在的连接点,图中虚线之前的图片是未参与空中三角测量的影像,之后的影像中的点是其他影像中可能存在的对应连接点。质量报告概述中指出平均每张影像提取出了 13706 个关键点,总共 268548个连接点,平均每张照片 831 个连接点,重投影误差为 0.75 个像素。一般来讲,重投影误差小于 1 则没有问题;否则需要重复多次进行空中三角测量,直到误差小于 1 为止。

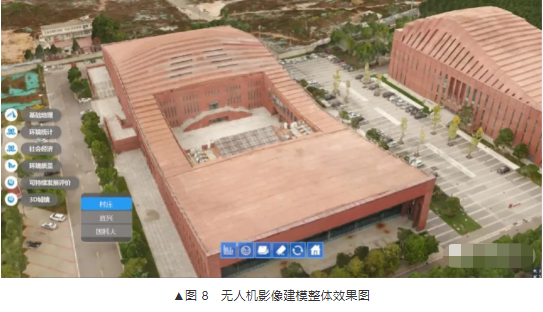
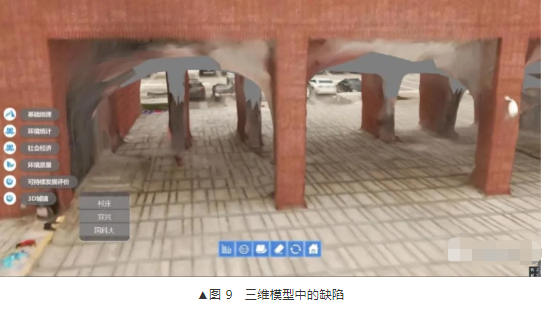
完成空三解算之后,生成三维模型和倾斜摄影稀疏点云。如图 8 所示,模型整体效果与精度都比较不错。但是某些细节区域,由于地物遮挡、影像质量不高等原因,地物会出现扭曲、空洞等问题,如图 9 所示。因此需要对该兴趣区进行地面激光雷达数据进行补充,以弥补该区域的缺陷。
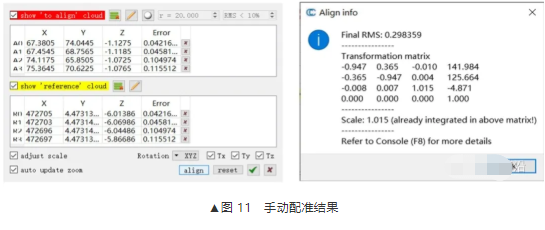
首先利用手动配准方法将地面扫描点云与无人机生成的点云进行配准。点云手动配准的结果(图 11),得到了一个旋转变换矩阵,同时也得到了变换的精度 RMS 为 0.298,这个配准精度明显不能够满足要求,需要进一步进行精配准。
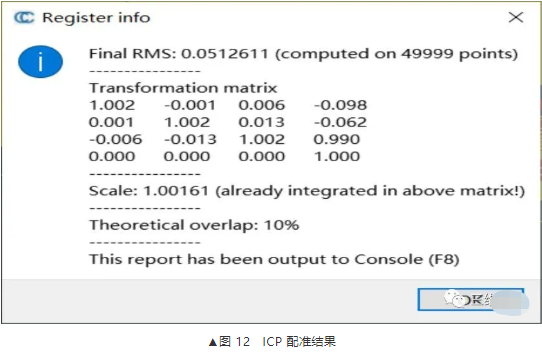
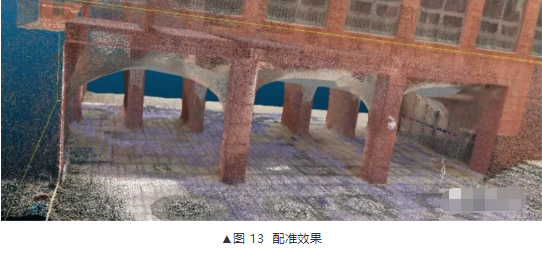
利用 ICP 算法进行精配准,由于 2 个点云的大小不一致,在使用 ICP 算法时,设置的重叠度也应该相应的进行修改(图 12),设置重叠度为 10%,得到的 RMS 为 0.05。图 13 展示了最终的配准效果。


文章来源:《重庆大学学报》
作者:谢云鹏,吕可晶
转载于:三维前沿
本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有。我们尊重作者的成果,如涉嫌侵权,请联系我们及时删除。
济南齐兴测绘科技有限公司 鲁ICP备16028244号-2

