 欢迎访问济南齐兴测绘科技有限公司网站!
欢迎访问济南齐兴测绘科技有限公司网站! 全国咨询热线:15553171585欢迎访问济南齐兴测绘科技有限公司网站!全国咨询热线:15553171585
全国咨询热线:15553171585欢迎访问济南齐兴测绘科技有限公司网站!全国咨询热线:15553171585
济南齐兴测绘科技有限公司
地址:济南市高新区新泺大街1166号奥盛大厦3号楼2007室
公司网址:www.jnqxch.com
微信号:15553171585
联系电话:0531-85929206
15553171585 薛经理
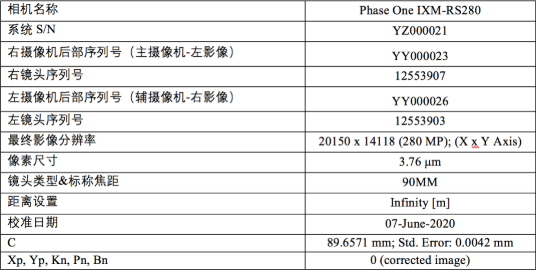
Phase One 280MP航拍解决方案(PAS 280)包含了两种航拍相机型号:
Phase One IXM-RS280F RGB——包括两个90mm镜头,用于捕获RGB信息
Phase One IXM-RS280F 4波段——包括一个附加的50mm焦距镜头和消色差150MP传感器,用于捕获近红外信息并提供4波段(RGB,NIR)和CIR影像。
PAS280系统是一个完整集成的系统,它包括陀螺稳定座架、GNSS、航线设计软件、飞行管理、影像和GNSS处理软件。
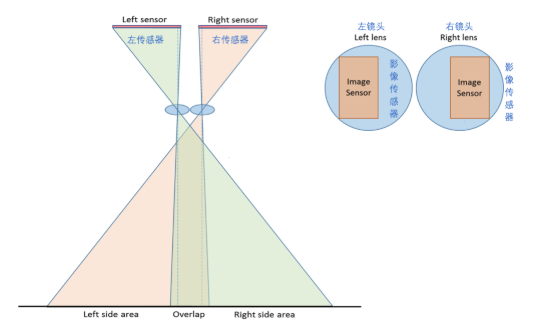
iXM-RS280F 光学设计
标定程序
表1
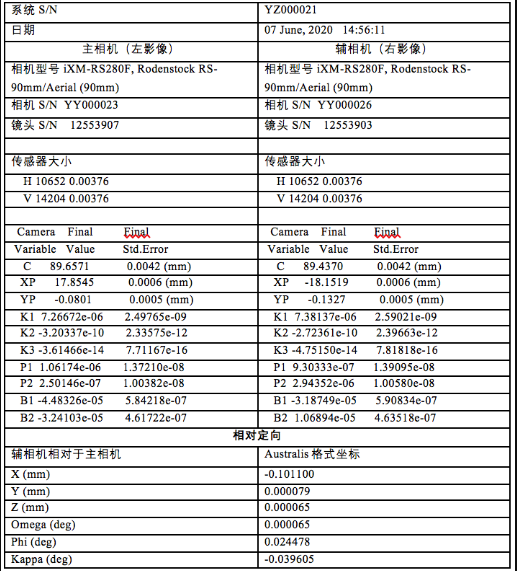
表2
标定测试场
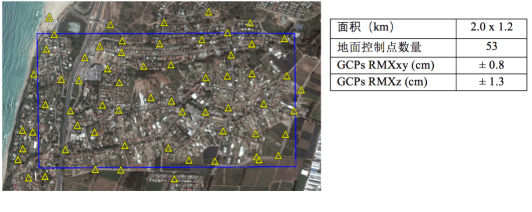
地面控制点测量过程包括:
大地观测是根据一个基准站中的静态GPS测量过程而执行的。
通过两个独立的1小时长时间段观测,对照CSAR永久GPS站对测区基站进行了测量。
每一个地面控制点都通过两个独立的半小时静态观测以测量。
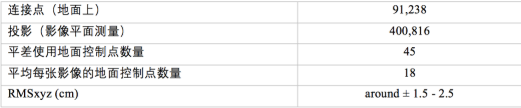
机载标定飞行和单张左右影像平差

使用在所有影像上测得的所有GCP,可以同时对左右摄像机捕获的影像进行平差。左右单个影像的同时区域网平差的典型结果如下所示:

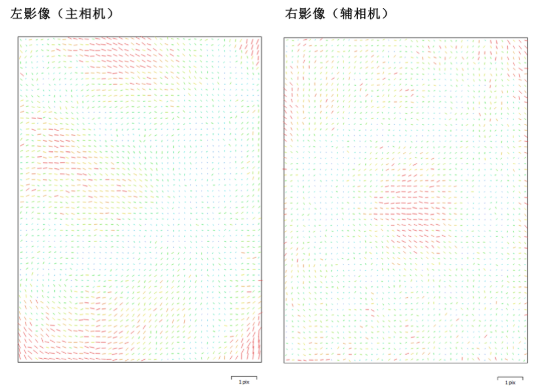
应用标定参数后的畸变残差
280MP拼接影像

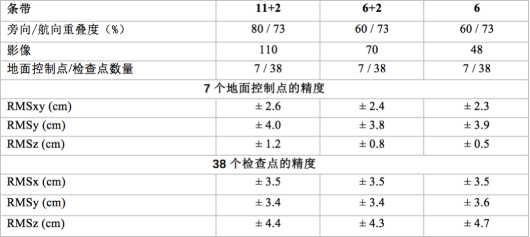
空三测量精度评估

立体量测精度分析
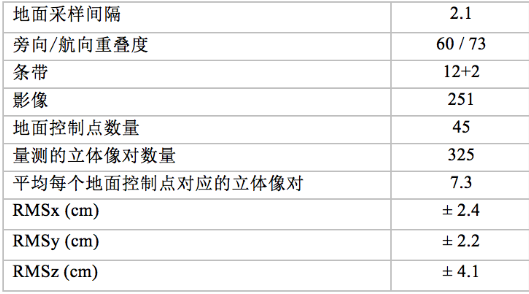
地面采样间隔为2cm的区域网的立体量测平面精度为1个像素,高程精度2个像素。
-----END-----
济南齐兴测绘科技有限公司 鲁ICP备16028244号-2

